Საღებავის ზედაპირის შემოწმების სისტემა
Ერთი და იგივე ბიტის ციკლის განმავლობაში სარგებლობენ ინტერნეტში ავტომატური რობოტის მარშრუტის სისტემით, რომელიც გამოიყენება სხეულის საღებავის ზედაპირების ინსპექტირებისთვის ყველა ფერის სერიაში. ის უზრუნველყოფს მეტროლოგიური დონის სიზუსტეს, ახდენს საღებავის ზედაპირის სუბიექტური და ერთგვაროვანი ინსპექტირების განხორციელებას და აცილებს ადამიანურ შეცდომებს. ის პირდაპირ ამცირებს წარმოების ხარჯებს ხელით შემოწმების მინიმუმამდე შემცირებით და ხელს უწყობს პროცესების ოპტიმიზაციას სანდო სტატისტიკური მონაცემების საშუალებით ხარჯების შესამცირებლად. ნიშნულის მიმცემი რობოტი ზუსტად ამინიშნებს ნაკლის ადგილებს, რითაც ამარტივებს ხელახლა დამუშავებასა და შეკეთებას. მომავალში რობოტის მარშრუტი შეძლებს ჩაანაცვლოს ხელით შრომა და მიაღწიოს ავტომატური ნაკლის შეკეთებას.
Აღწერა
PAINTSCAN - ახალი ჰიბრიდული ტექნოლოგია
Ჩაშენებული მოდულების საშუალებით, ორი ზედაპირის შემოწმების მეთოდი ერთ და იმავე სენსორშია ინტეგრირებული
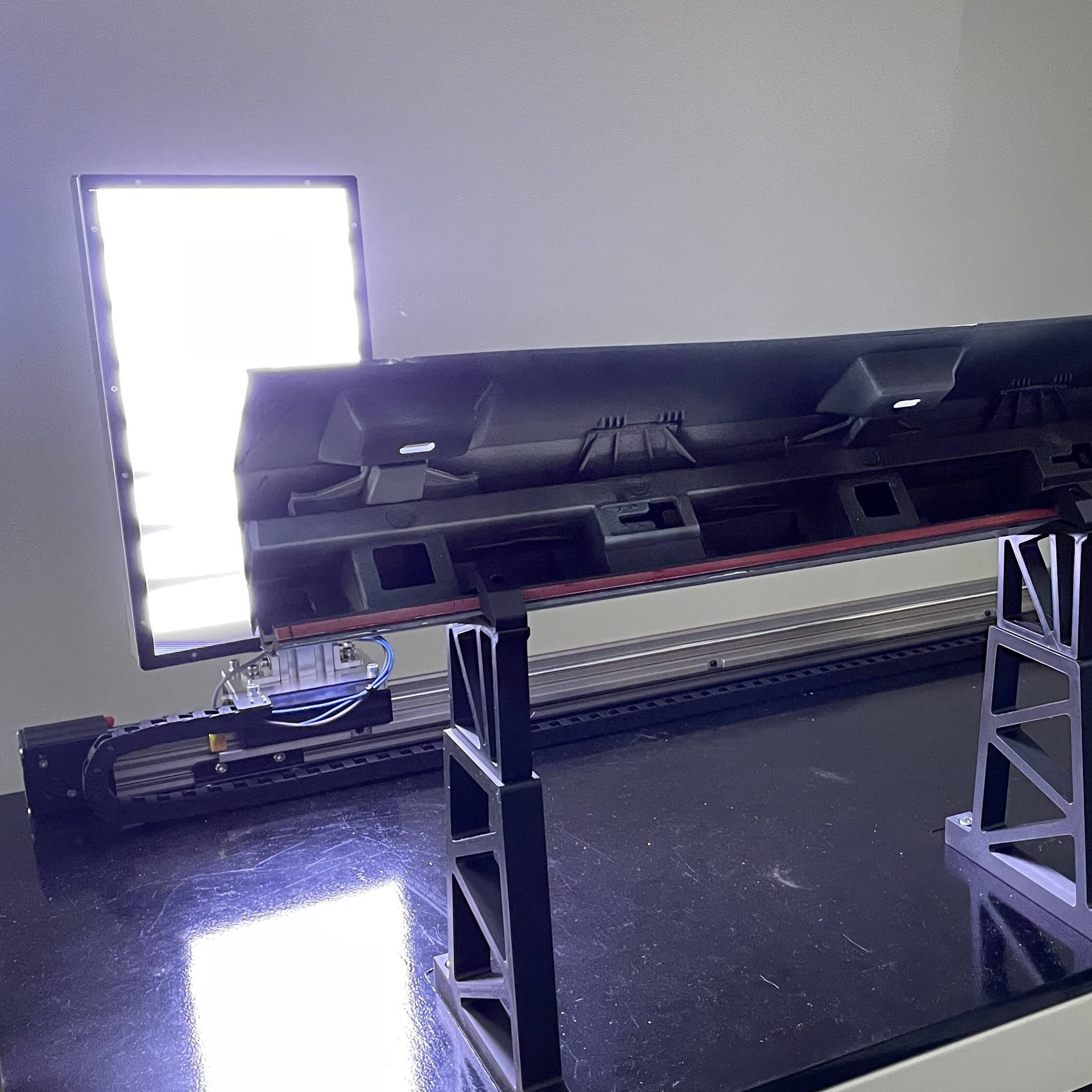
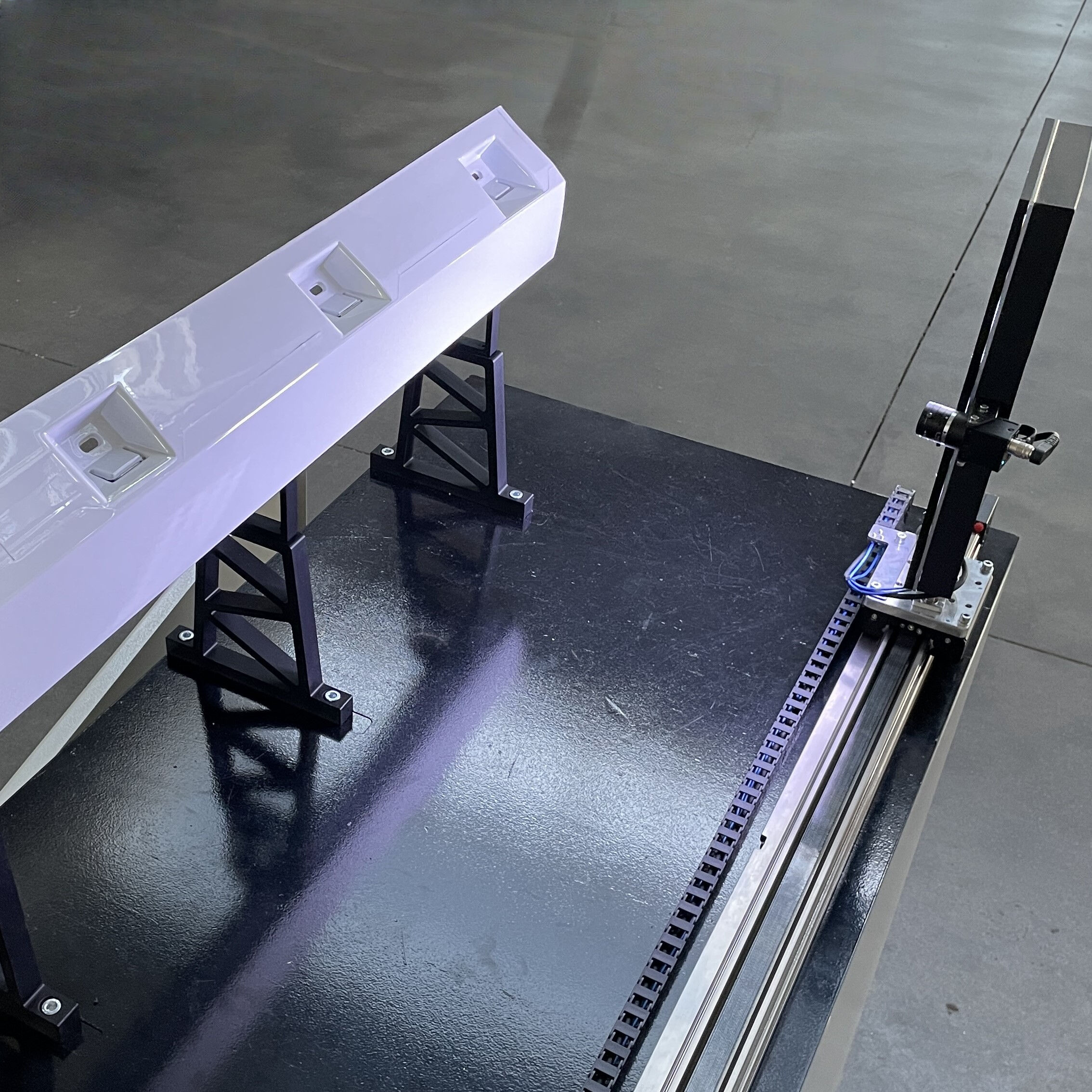
LED მატრიცული მონიტორი დამოუკიდებელი განათების რეჟიმებით
Გაბნევის სინათლის განათება მაღალი ოპტიკური მგრძნობელობით
Ციფრული კამერა მაღალი გამოსახულებით და მაღალი შეღების სიხშირით (200 ჰც)
Კამერა პირდაპირ არის დაკავშირებული ჩაშენებულ კომპიუტერულ ბლოკთან
Შეუძლია გამოავლინოს ყველა საღებავის ზედაპირის დეფექტი, როგორც ზედაპირის ფორმასთან დაკავშირებული, ისე ურთიერთმასთან დაკავშირებული
Მანქანის სხეულის თითოეული პოზიცია გადის მრავალ შემოწმებას 10 სურათამდე
Შემოწმების რეჟიმები: "ხაზის თავსება" ან "დგომა და წასვლა"
Მანქანის შემოწმების დრო: < 50-70 წამი (4 რობოტით; კონკრეტული დრო დამოკიდებულია შემოწმებული ზედაპირის ზომაზე)
Შენიშვნა: ბოლო ტექნოლოგიის მიხედვით, 7-ღერძიანი რობოტების გამოყენებით შესაძლებელია ინსპექციის დრო შეიცვალოს < 40-60 წამში
Ავტომატური მარკირების სისტემა
Ვიზუალური კოორდინატთა სისტემა ქმნის საღებავი დეფექტების ადგილმდებარეობას
Ინსპექციის სისტემა ათვლის კოორდინატებს მანქანის კორპუსის კოორდინატთა სისტემაში (დაფუძნებულია 3D რობოტის ტრაექტორიის მონაცემებზე)
Მარკირების სისტემა ავტომატურად ქმნის დინამიურ მარკირების ტრაექტორიებს
Ავტომატური ტრაექტორიის მორგება და ყველა დეფექტის მარკირების შემთხვევაში შეჯახების პროფილაქტიკა
Თითოეული დეფექტის მარკირება იღებს დაახლოებით 3 წამს (რობოტის მოძრაობის დროს შესაბამისად)
hop საშუალებას აძლევს ყველა ბრენდის რობოტებთან თანაგორგობას