Système d'inspection de surface peinte
Dans le même cycle de battement, le système de guidage robotique automatisé en ligne est utilisé pour inspecter les surfaces peintes de la carrosserie de toutes les séries de couleurs. Il atteint une précision au niveau métrologique, réalise une inspection objective et cohérente des surfaces peintes, et élimine les erreurs humaines. Il réduit directement les coûts de production en minimisant l'inspection manuelle et optimise les processus de production pour réduire les coûts grâce à des données statistiques fiables. Le robot de marquage marque précisément les emplacements des défauts, simplifiant ainsi les travaux de reprise et de réparation. À l'avenir, le guidage robotique pourra remplacer la main-d'œuvre humaine pour réaliser une réparation automatique des défauts.
Description
PAINTSCAN - Une Nouvelle Technologie Hybride
Grâce à des modules intégrés, deux méthodes d'inspection de surface sont intégrées dans le même capteur
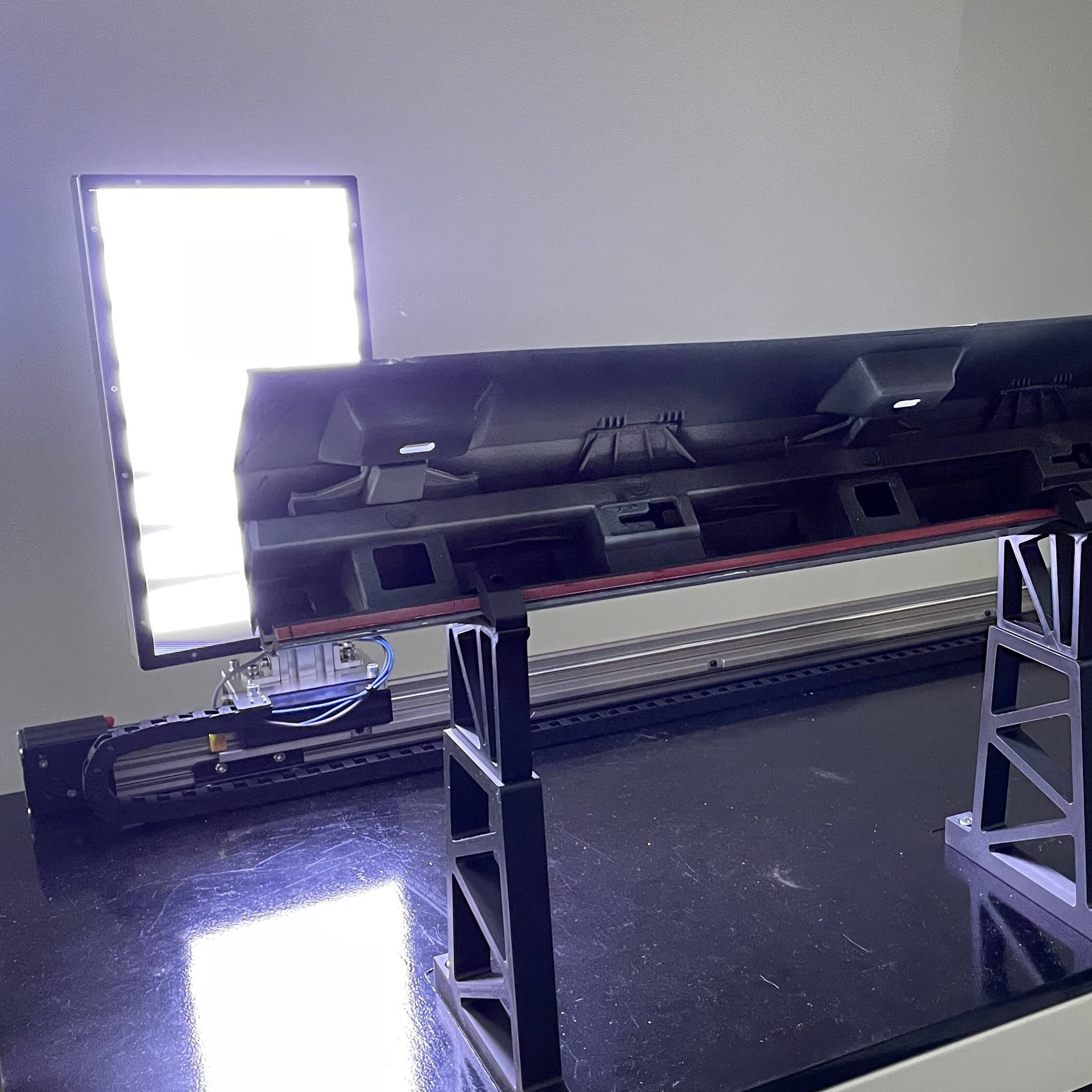
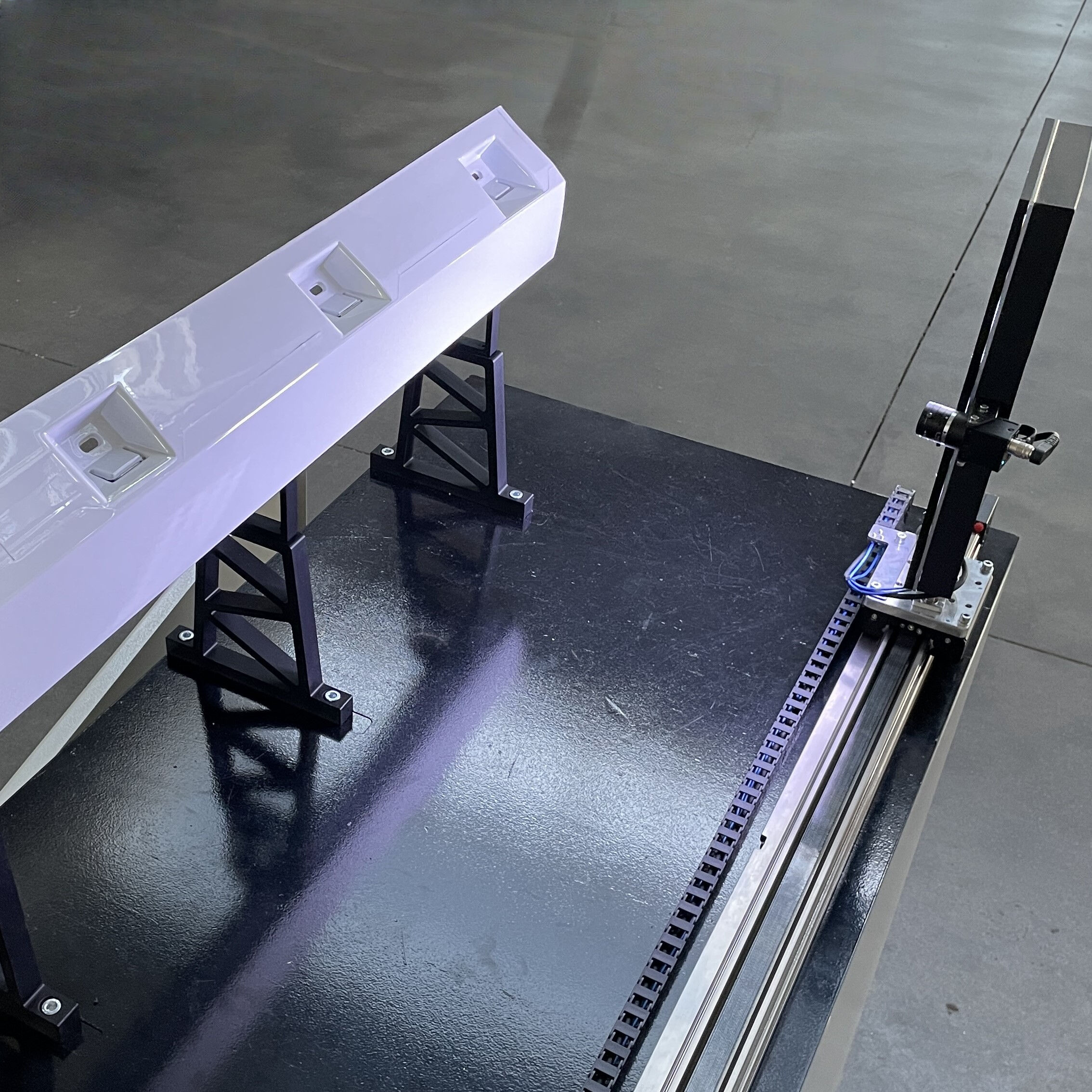
Moniteur matriciel LED avec modes d'éclairage indépendants
Illumination à lumière diffuse avec une haute sensibilité optique
Caméra numérique haute résolution et haute fréquence d'acquisition (200 Hz)
Caméra directement connectée à l'unité informatique embarquée
Capable de détecter tous les défauts de surface de peinture, qu'ils soient liés ou non à la forme de la surface
Chaque position du châssis du véhicule subit plusieurs inspections à travers jusqu'à 10 images
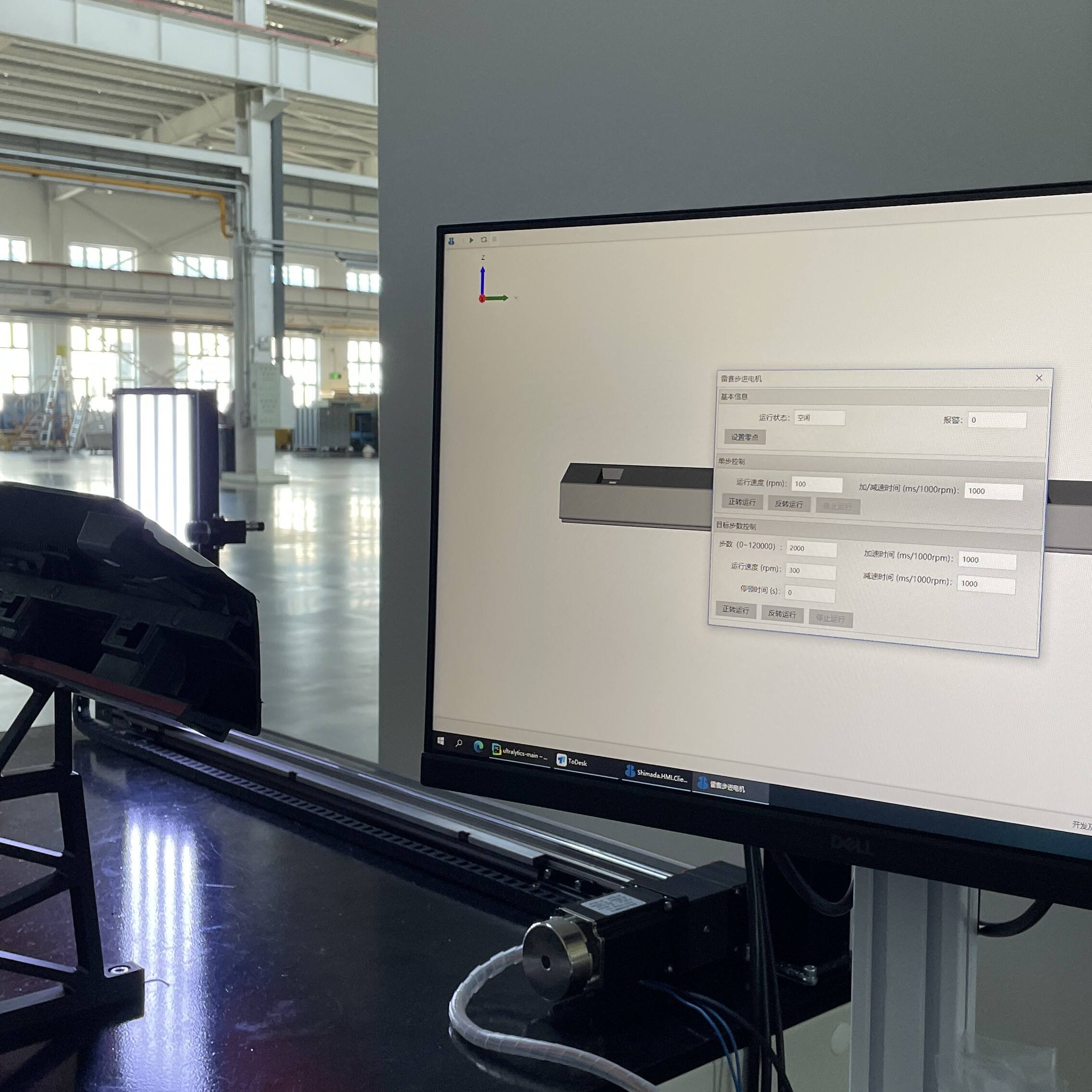
Modes d'inspection : « Suivi de ligne » ou « Arrêt et marche »
Temps d'inspection du véhicule : < 50-70 secondes (avec 4 robots ; le temps spécifique dépend de la surface inspectée)
Remarque : Selon la dernière technologie, l'utilisation de robots 7 axes permet de réduire le temps d'inspection à < 40-60 secondes
Système de marquage automatique
Le système de coordonnées visuel génère les emplacements des défauts de peinture
Le système d'inspection calcule les coordonnées dans le système de coordonnées du châssis du véhicule (basé sur les données du chemin robotique 3D)
Le système de marquage génère automatiquement des trajectoires de marquage dynamiques
Réglage automatique des trajectoires et inspection anti-collision pour toutes les marques de défauts
Chaque marquage de défaut prend environ 3 secondes (temps de déplacement du robot inclus)
Compatible avec les robots de toutes les marques