Gentleman
Múltiplos modelos, personalização não padronizada
Três modelos básicos, com suporte para personalização, cobrindo uma gama de tamanhos de abertura de 4mm a 120mm.
Descrição
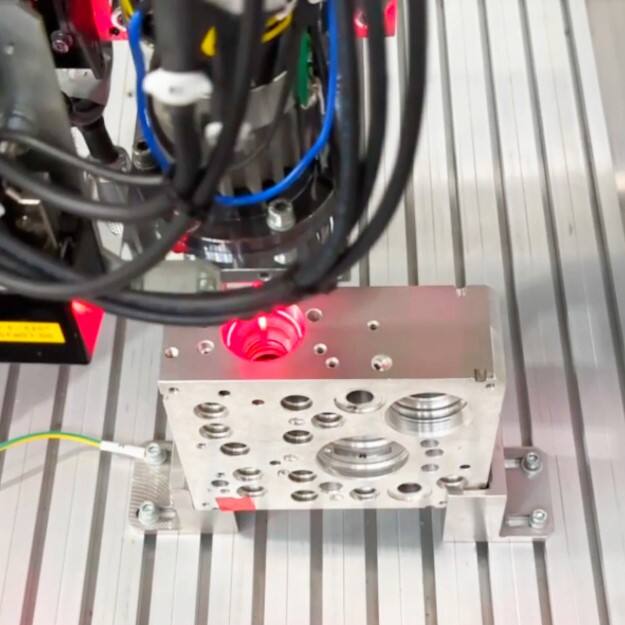
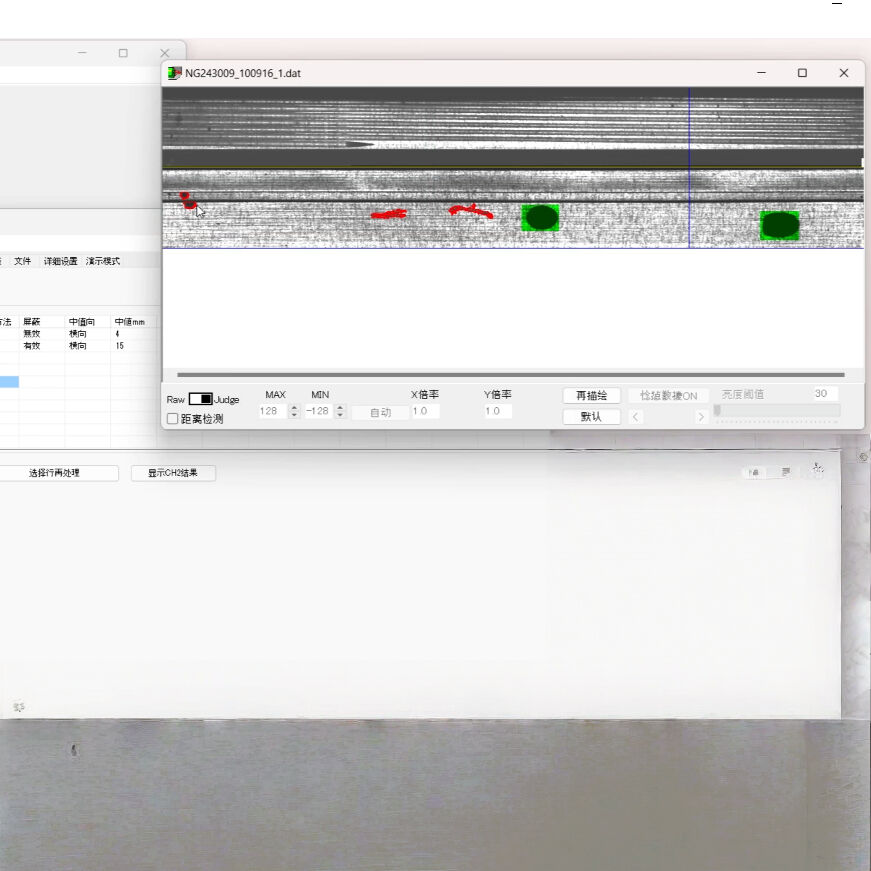
| Conteúdo de detecção | Defeitos como arranhões e bolhas nas paredes internas dos furos. |
| Indústria Aplicável | Indústria automotiva. |
| Peças correspondentes | Componentes incluindo furos com rosca, furos passantes, furos cegos, etc. |
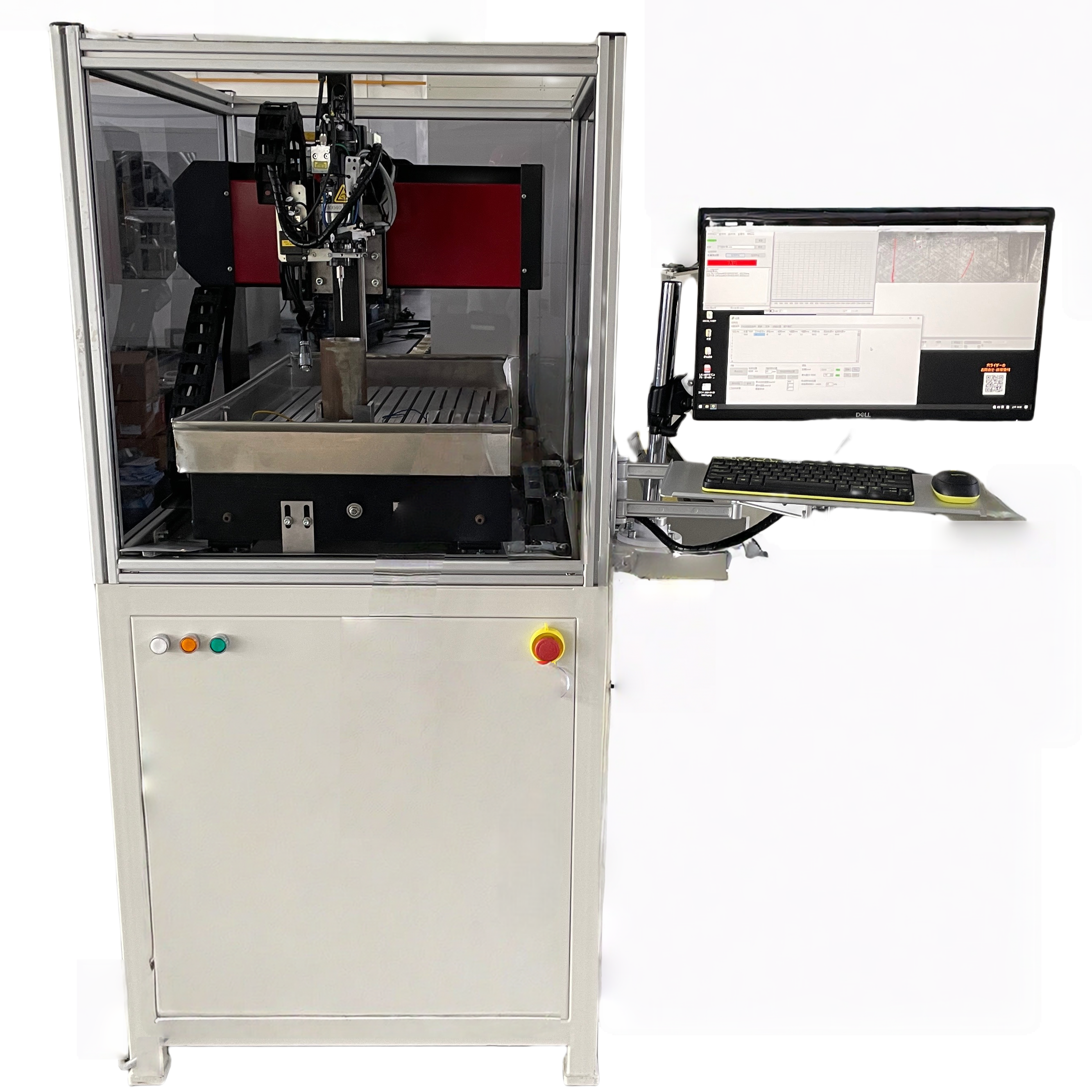
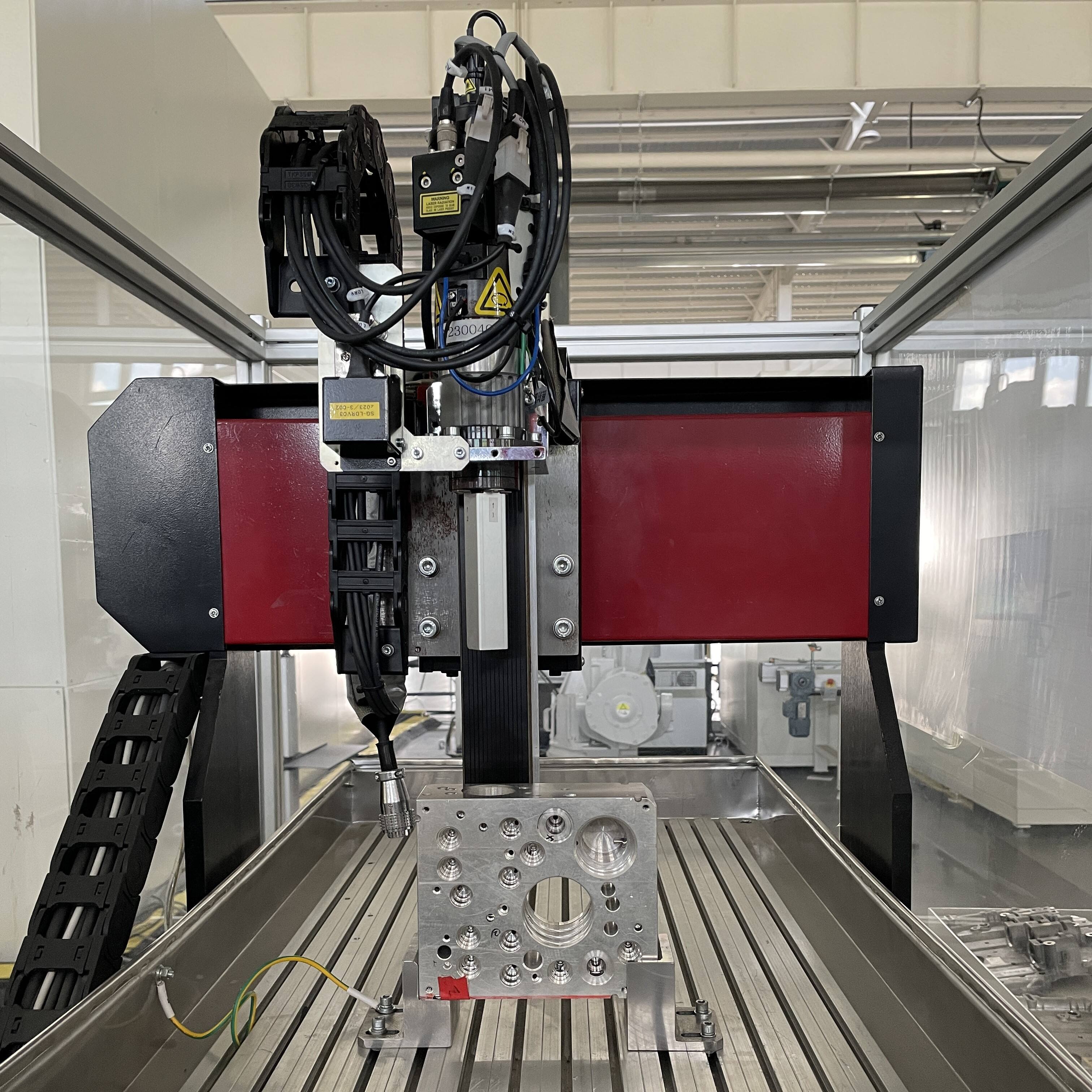
| Transmissão de Equipamentos | Baseado em robô, com sistema servo de dois eixos. |
| Descrição do Equipamento | Capaz de detectar defeitos nas paredes internas de furos com diâmetro mínimo de φ4mm. |
| Especificações | Personalização não padrão. |
| Ritmo de produção | Velocidade de inspeção de 25-50mm/s. |
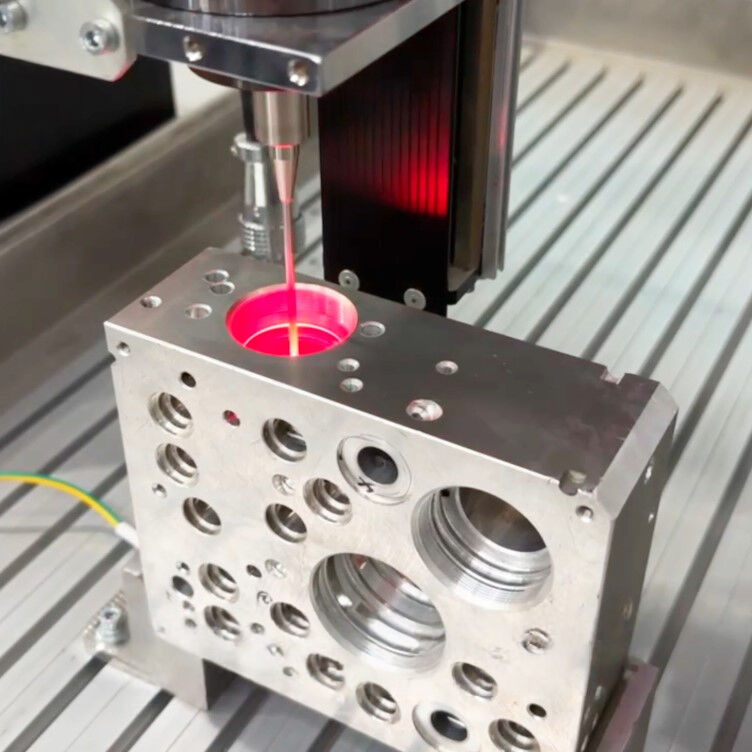
| Método de Imagem | Imagem a laser. |
| Fonte de luz | Laser semicondutor vermelho. |
| Defeito Mínimo Detectável | Contornos maiores que 0,2mm podem ser detectados. |
| Resolução Mínima | 0,01mm. |
| Sistema de Controle | Computador industrial e PLC. |
Detectando peças diversas
Várias peças, como corpo de válvula, bloco do cilindro, manga, núcleo do motor, carcaça, etc., são inspecionadas, suportando formas de inspeção com sonda robótica e centros de usinagem.
Descrição do dispositivo
Ao utilizar uma lente a laser rotativa de alta velocidade (12000 rotações por minuto), defeitos como arranhões, amassados e furos de areia são detectados na parede interna do orifício. Esta forma de detecção possui vantagens evidentes, especialmente para orifícios estreitos (com diâmetro mínimo de 4mm e precisão de 0,3mm). O laser pode substituir fontes de luz para uma imagemção perfeita, e com um algoritmo dedicado de detecção, o efeito de detecção de defeitos na parede interna do orifício é excelente, com alta precisão e resistência à interferência luminosa.