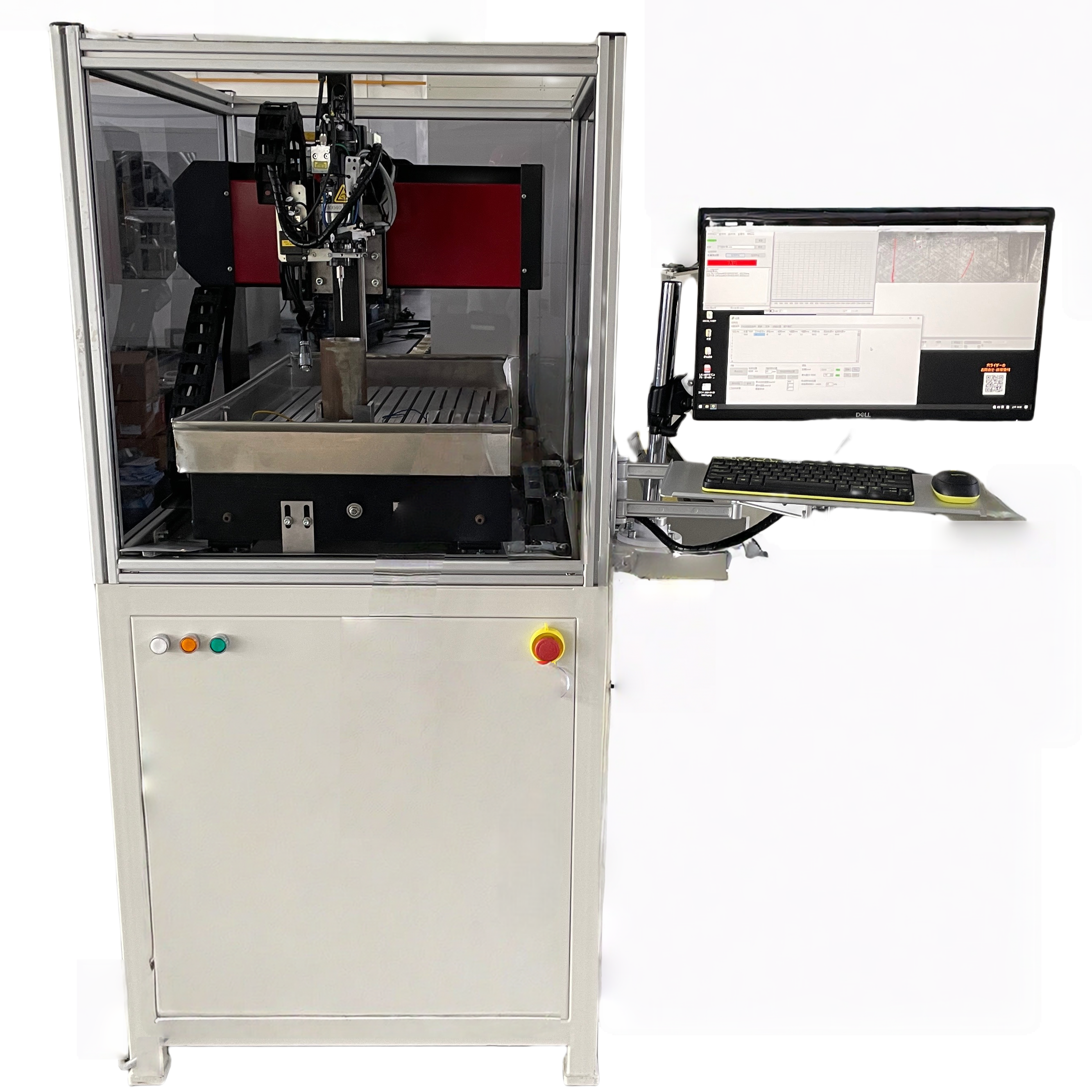
説明
製品パラメータ
| 検出内容 | 穴の内壁における傷や巣あきなどの欠陥。 |
| 適用される産業 | 自動車業界。 |
| 対応ワーク | ねじ穴、貫通穴、貫通しない穴など、各種穴を含む部品。 |
| 装置の駆動 | ロボットベースの2軸サーボシステム。 |
| 設備の説明 | 最小径φ4mmの穴内壁の欠陥を検出可能。 |
| 仕様 | 非標準のカスタマイズ対応。 |
| 生産ピッチ | 25〜50mm/sの検査速度。 |
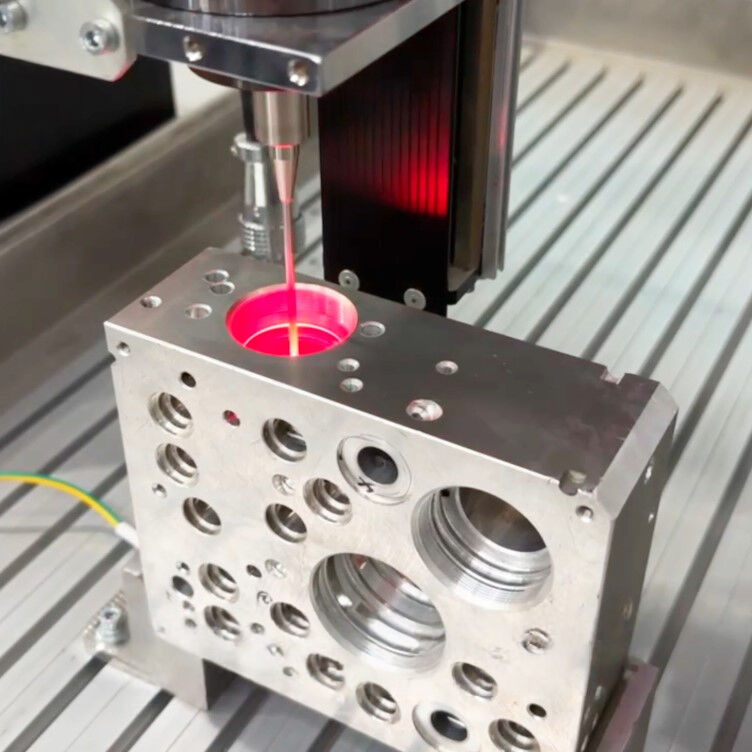
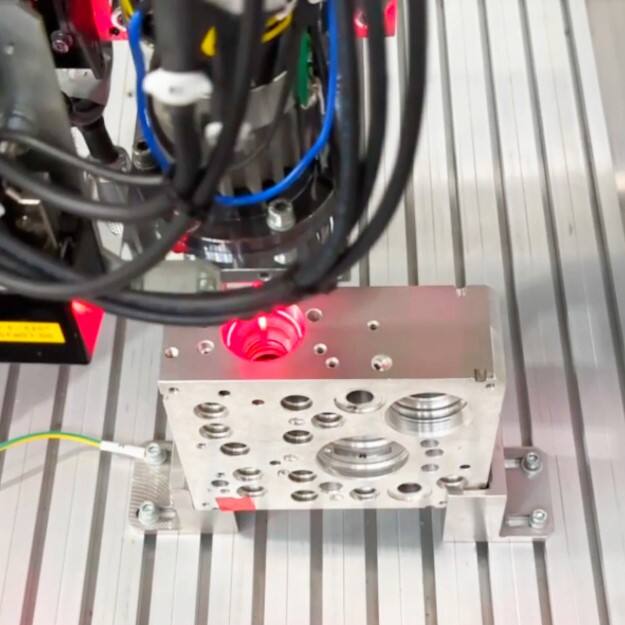
| 撮影方法 | レーザーイメージング |
| 光源 | 赤色半導体レーザー |
| 検出可能な最小欠陥 | 0.2mmを超える輪郭を検出可能 |
| 最小解像度 | 0.01mm。 |
| 制御システム | 産業用コンピュータおよびPLC |
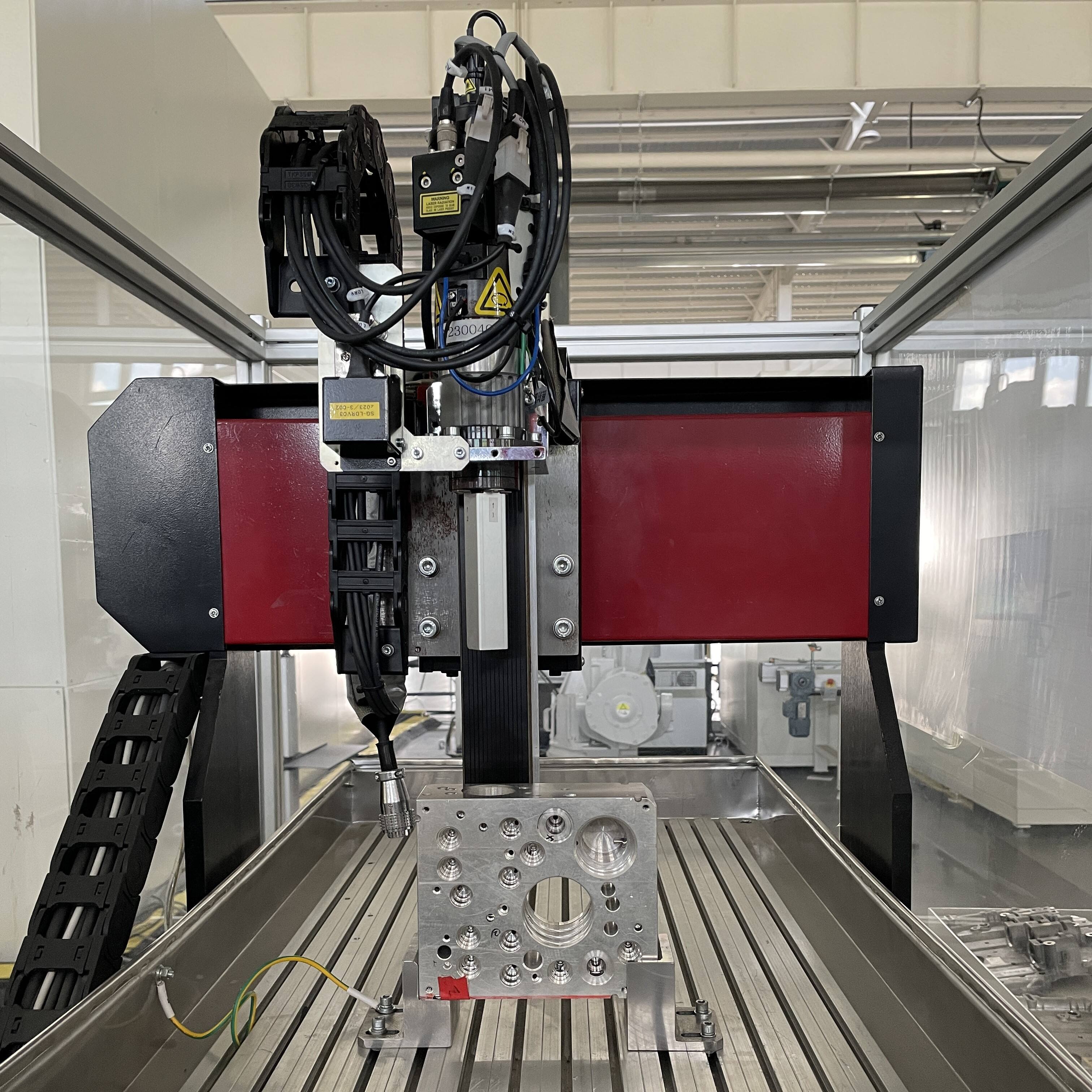
多様なワークの検出
バルブボディ、シリンダーボディ、スリーブ、モーターコア、ハウジングなど複数の部品を検査でき、ロボットプローブ保持およびマシニングセンタ形式をサポート
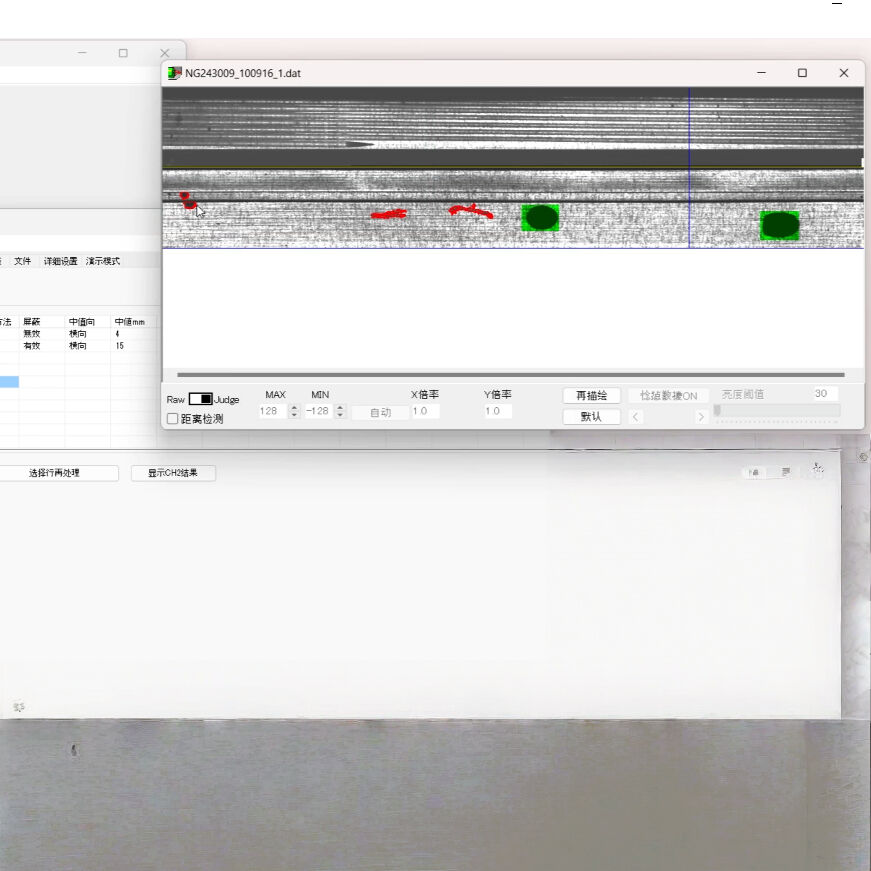
装置の説明
高速回転レーザーレンズ(毎分12000回転)を使用することにより、穴の内壁に発生する傷、凹み、サビ穴などの欠陥を検出します。この検出方式は特に狭い穴(最小穴径4mm、精度0.3mm)において顕著な利点があり、レーザーは光源に代わって完璧な画像化を実現し、専用の検出アルゴリズムにより穴の内壁の欠陥検出効果が非常に優れており、検出精度が高く、光干渉への耐性があります。