
পেইন্ট সি - পেইন্ট পৃষ্ঠ পরিদর্শন ব্যবস্থা
পেইন্ট পৃষ্ঠ পরীক্ষা সিস্টেম সমস্ত রং-এর গাড়ির দেহের পেইন্ট পৃষ্ঠের উচ্চ-নির্ভুল, স্বয়ংক্রিয় সনাক্তকরণ সরবরাহ করে, সবকিছু একক উৎপাদন চক্রের মধ্যে। উন্নত রোবটিক পরিচালনা দ্বারা চালিত, সিস্টেমটি মেট্রোলজি-স্তরের নির্ভুলতা অর্জন করে, বস্তুনিষ্ঠ এবং সামঞ্জস্যপূর্ণ পরীক্ষা ফলাফল নিশ্চিত করে যখন মানব ত্রুটি দূর করে।
হাতে লেখা পরীক্ষার উপর নির্ভরতা কমিয়ে প্রস্তুতকারকরা উৎপাদন খরচ কমাতে পারেন, যেমন প্রক্রিয়াগুলিকে অপটিমাইজ করতে এবং দক্ষতা বাড়াতে নির্ভরযোগ্য পরিসংখ্যান সহায়তা করে। সংহত চিহ্নিতকরণ রোবটগুলি ত্রুটির অবস্থানগুলি সঠিকভাবে নির্দেশ করে, পুনরায় কাজ এবং মেরামত সহজতর করে তোলে। ভবিষ্যতে, রোবট দ্বারা পরিচালিত হয়ে এই প্রযুক্তি সম্পূর্ণ স্বয়ংক্রিয় ত্রুটি মেরামতের অনুমতি দিতে পারে।
বিবরণ
নাইট - পেইন্ট পৃষ্ঠতল পরিদর্শন সিস্টেম
পেইন্ট সারফেস ইনস্পেকশন সিস্টেম এক নির্মাণ চক্রের মধ্যেই সব রঙের গাড়ির বডি পেইন্ট সারফেসের উচ্চ-নির্ভুল, স্বয়ংক্রিয় সনাক্তকরণ প্রদান করে। অত্যাধুনিক রোবটিক গাইডেন্সের সাহায্যে চালিত, মেট্রোলজি-স্তরের নির্ভুলতা অর্জন করে, উদ্দেশ্যনিষ্ঠ এবং সামঞ্জস্যপূর্ণ পরিদর্শন ফলাফল নিশ্চিত করে যখন মানব ত্রুটি দূর করে।
হাতে লেখা পরীক্ষার উপর নির্ভরতা কমিয়ে প্রস্তুতকারকরা উৎপাদন খরচ কমাতে পারেন, যেমন প্রক্রিয়াগুলিকে অপটিমাইজ করতে এবং দক্ষতা বাড়াতে নির্ভরযোগ্য পরিসংখ্যান সহায়তা করে। সংহত চিহ্নিতকরণ রোবটগুলি ত্রুটির অবস্থানগুলি সঠিকভাবে নির্দেশ করে, পুনরায় কাজ এবং মেরামত সহজতর করে তোলে। ভবিষ্যতে, রোবট দ্বারা পরিচালিত হয়ে এই প্রযুক্তি সম্পূর্ণ স্বয়ংক্রিয় ত্রুটি মেরামতের অনুমতি দিতে পারে।
পেইন্টস্ক্যান - হাইব্রিড প্রযুক্তি
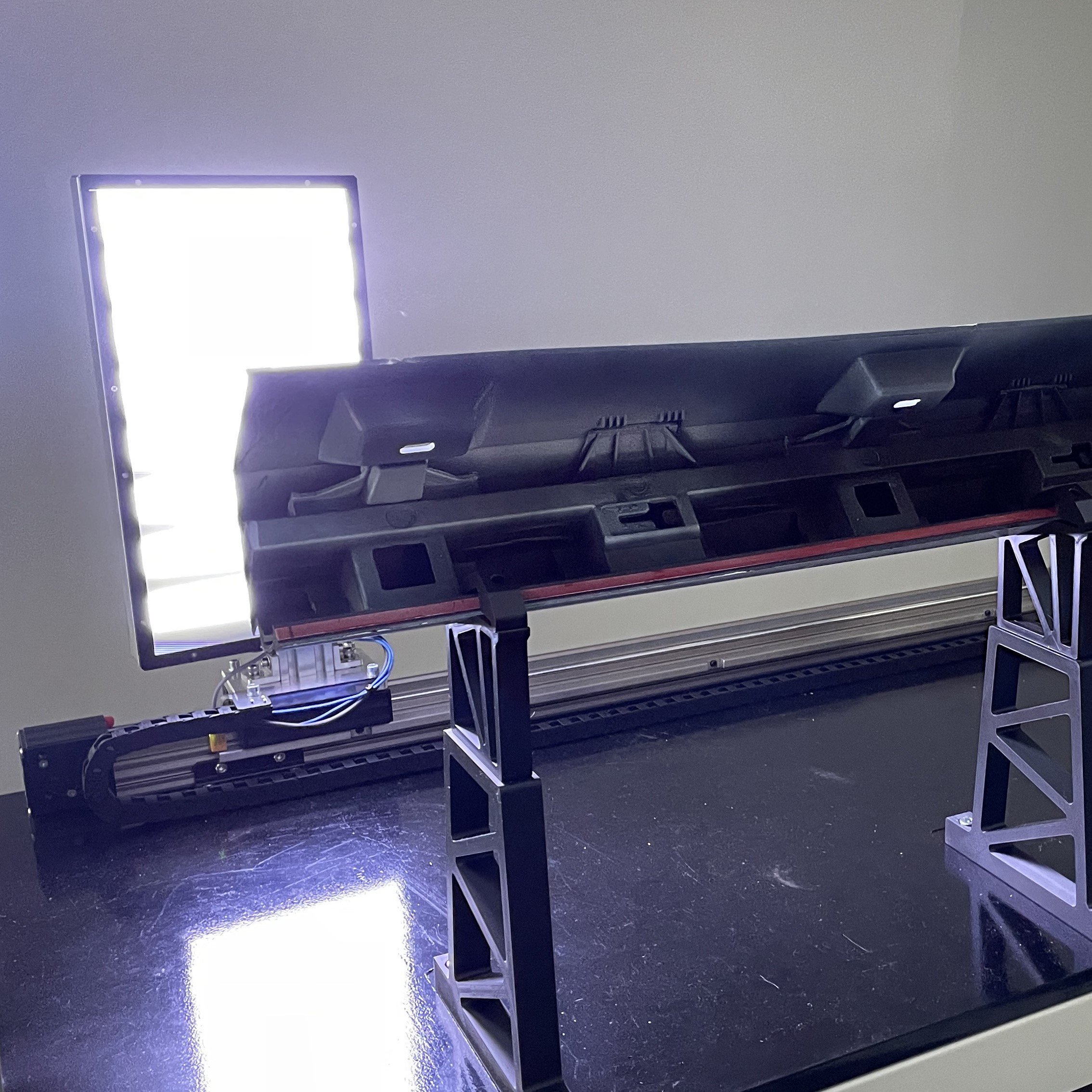
পেইন্টস্ক্যান সিস্টেম একটি এম্বেডেড মডিউলের মাধ্যমে এক সেন্সরে দুটি পৃষ্ঠতল পরিদর্শন পদ্ধতি একীভূত করে, ব্যাপক এবং কার্যকর ত্রুটি সনাক্তকরণ সক্ষম করে।
উৎসর্গীকৃত আলোকসজ্জা মোড সহ এলইডি ম্যাট্রিক্স মনিটর
উচ্চ আলোক সংবেদনশীলতা সহ বিক্ষিপ্ত আলোকসজ্জা
দ্রুত অর্জন গতি (200 হার্জ) সহ উচ্চ-রেজোলিউশন ডিজিটাল ক্যামেরা
ক্যামেরা থেকে এম্বেডেড কম্পিউটারে সরাসরি সংযোগ
আকৃতি সংক্রান্ত এবং আকৃতি নিরপেক্ষ সকল পৃষ্ঠের ত্রুটি সনাক্ত করে
একাধিক চিত্রের যাচাই (প্রতি অবস্থানে সর্বোচ্চ 10টি চিত্র পর্যন্ত)
নিরীক্ষণ মোড:
লাইন ট্র্যাকিং (অবিচ্ছিন্ন স্ক্যানিং)
স্টপ-অ্যান্ড-গো (পদক্ষেপ অনুসারে স্ক্যানিং)
সম্পূর্ণ যানবাহন নিরীক্ষণের সময়:
4 টি রোবট সহ 50–70 সেকেন্ড (পৃষ্ঠের ক্ষেত্রফলের উপর নির্ভরশীল)
7-অক্ষীয় অ্যাডভান্সড রোবোট দিয়ে <40–60 সেকেন্ডে
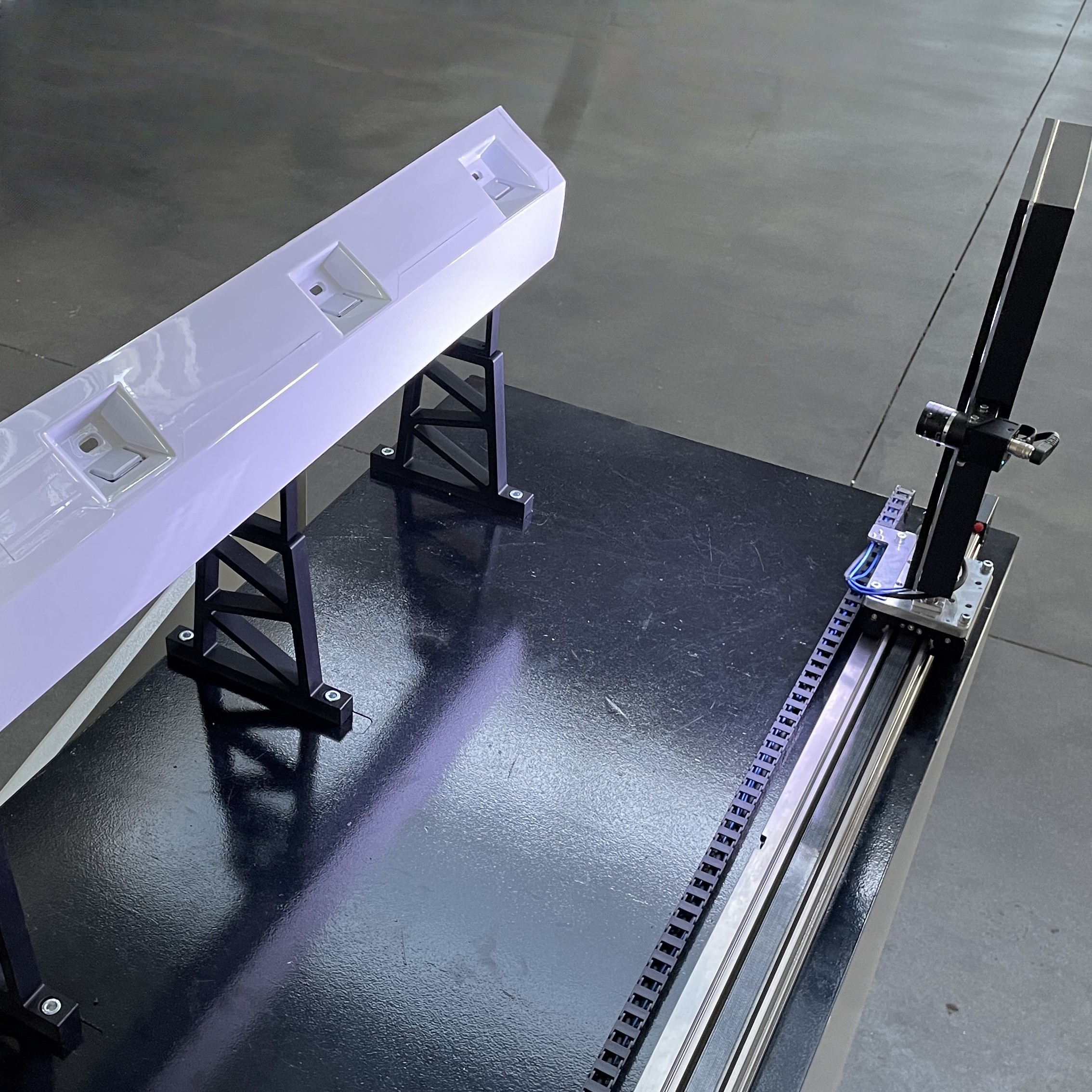
অটোমেটেড মার্কিং সিস্টেম
গাড়ির বডি রেফারেন্স ফ্রেমের ভিতরে একটি ভিজুয়াল কোঅর্ডিনেট সিস্টেম ব্যবহার করে রং এর ত্রুটিগুলি খুঁজে পাওয়া হয়
সংঘর্ষ এড়ানোর পরীক্ষা সহ মার্কিং সিস্টেম ডাইনামিক মার্কিং ট্র্যাজেক্টরি তৈরি করে
রোবোট সঞ্চালন সময়সহ প্রতিটি ত্রুটি প্রায় 3 সেকেন্ডে চিহ্নিত করা হয়
সমস্ত প্রধান রোবোট ব্র্যান্ডের সাথে সামঞ্জস্যপূর্ণ
এই সিস্টেমটি রং পৃষ্ঠের গুণগত মান নিশ্চিতকরণে একটি নতুন মানদণ্ড প্রতিনিধিত্ব করে - সত্যতা, দক্ষতা এবং খরচ বাঁচানোর পাশাপাশি ভবিষ্যতে স্বয়ংক্রিয় ত্রুটি মেরামতের পথ প্রশস্ত করে